
Motor DC con reductora usado en robótica.


Este es el primero de tres post en el que vamos a ver los motores DC más usados en robótica.
-Motor DC simple con reductora
-Motor paso a paso
-Servomotor
En este primer post hablaremos del motor DC simple con reductora.
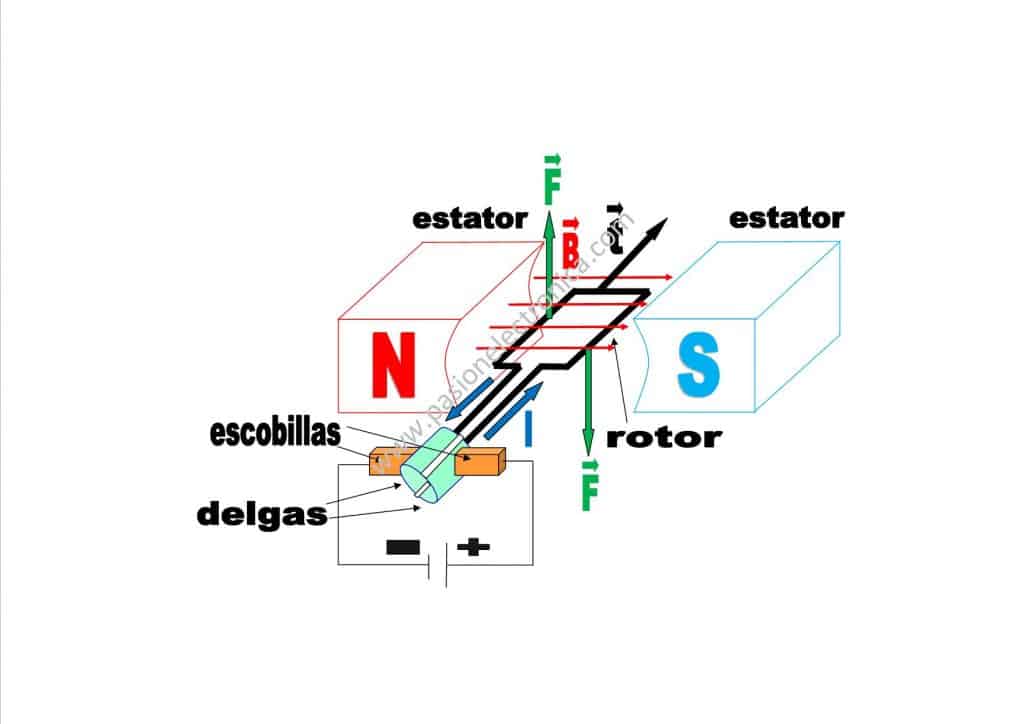
Funcionamiento del motor de continua:
El motor de continua está compuesto de varias partes las más grandes son el estator y el rotor.
El estator que sirve para dar soporte mecánico al motor que tendrá un bobinado o la propia armadura será un imán permanente, el rotor por su parte está compuesto por varios bobinados, parte de él tiene forma cilíndrica en el que se alojan unas delgas (placas metálicas que en contacto con la alimentación del motor a través de unas escobillas van cambiando la polaridad al girar).
El estator genera un campo magnético perpendicular al del estator, por lo que se crea un par de fuerzas que hacen girar al rotor.

Si quieres convertirte en un experto en Arduino pincha en el siguiente botón
Características del motor DC con reductora:
Este motor DC tiene la características que gira a muy alta velocidad poco par, pero tiene muy poca precisión para que pare en un sitio justo y determinado.
Por lo que sus usos deben de ser donde la precisión no sea importante y si la velocidad de giro.
En muchas aplicaciones de robótica no necesitamos una alta velocidad, pero sí que tenga más par para poder hacer girar una rueda con un peso considerable y que sea capaz de arrastrar al robot.
De hay que se use motores DC con reductora, perdemos velocidad pero ganamos par.

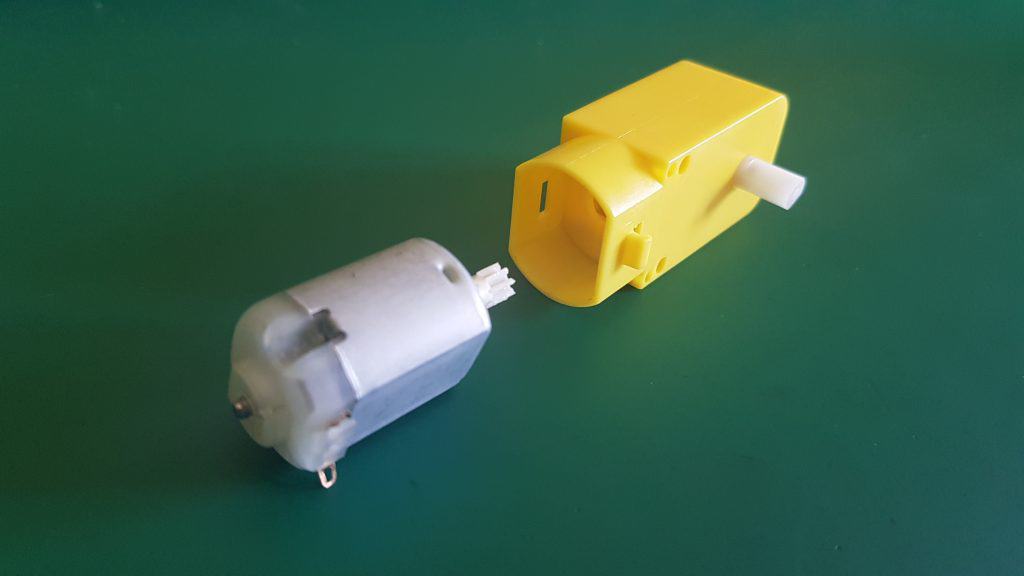

Este motor lo podemos usar solo sin reductora si necesitamos mucha velocidad y poco par, o acoplándole la reductora si necesitamos mucho más par que velocidad.
En esta última imagen se aprecia los engranajes de la reductora.
Función de la reductora
Esta lo que hace es reducir el número de vueltas que da el eje principal.
Por ejemplo si nos encontramos un motor en que sus especificaciones nos dice que es 56:1 quiere decir que mientras el engranaje primario da 56 vueltas el secundario da 1.
Otras características de este motor es que puede girar 360º.
Para invertir el giro del motor tan solo tenemos que invertir la polaridad de la alimentación.
Este motor en concreto funciona entre 3-6Vdc tiene un consumo en vacío con la reductora máximo de 180mA.
Debido al consumo no podremos conectar directamente a un pin de salida de Arduino, para ello deberemos intercalar una electrónica de potencia o driver, lo más usual es usar un puente H que veremos en un post posterior.
En la siguiente imagen puedes observar el acoplo del motorreductor con una rueda del robot.

Si te ha gustado este post compartelo en tus redes sociales favoritas.